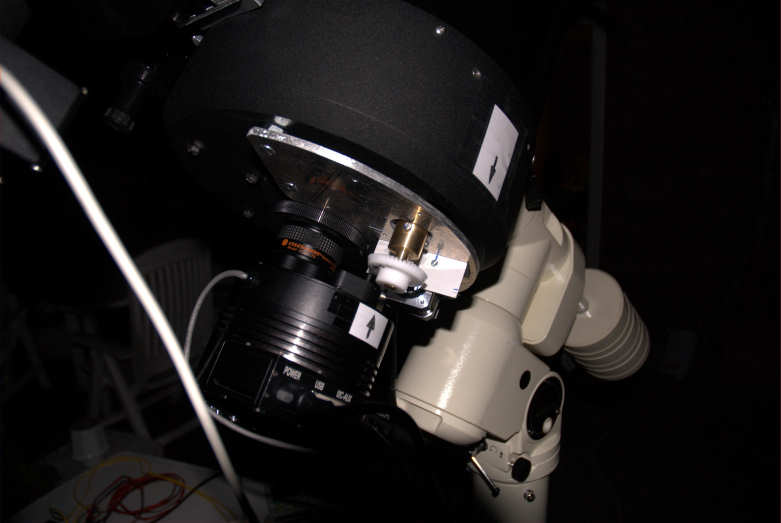
Bild 1: Die Scharfeinstellung am C11
Wenn es im Winter kalt ist, dann ist es schön, wenn das Teleskop draußen steht, schöne Bilder vom klaren Sternhimmel per Digitalkamera aufnimmt - und ansonsten ist die Tür nach draußen zu! Inzwischen benötige ich nur noch ein USB-Kabel, welches nach draußen auf die Terrasse geht. Darüber werden beide CCD-Kameras (eine für die Aufnahme, eine für die Nachführung), der SkySensor PC 2000 und ggf. der Schrittmotor im Spektrometer gesteuert. Der Rechner mit der Steuersoftware steht dann bei mir im Wohnzimmer. Eine Einstellung fehlt jedoch hier in der Liste: Die Scharfstellung des Teleskops. Auch hier kann ein Schrittmotor benutzt werden. Dies ist sogar besonders interessant, da man beim Scharfstellen des Teleskops sehr oft nach draußen gehen muss, um die Einstellung in kleinen Schritten zu ändern, bis man eine optimale Einstellung erreicht hat. Dieses "Rein und Raus" ist besonders im Winter bei niedrigen Temperaturen nicht gerade Öl- und Gas sparend.
Also Feile, Bohrmaschine und Schraubendreher raus, um einen Schrittmotor an das Teleskop zu bauen, der die Schärfeeinstellung manipuliert.
In Bild 1 ist die durchgeführte Baumaßnahme dargestellt.
Bild 1: Die Scharfeinstellung am C11
Zunächst wurde unter dem C11 ein Basisplatte aus 5 mm starkem Aluminium angebracht. Diese Platte bedeckt nur einen Teil der Rückseite des Teleskops um das Gewicht gering zu halten. Hierzu wurden in die Rückseite des Tubus mehrere Löcher gebohrt, die mit einem Gewinde versehen wurden. Für diese Maßnahme musste natürlich der gesamte Tubus auseinander genommen werden, was nicht ganz so einfach ist. Wer dieses Risiko nicht eingehen will, muss entweder mit Klebeband arbeiten oder eine Klemmhalterung am Außenrand des Tubus anbringen.
Der Knopf für die Hand-Scharfstellung des Celestron C11 wird abgebaut und durch ein speziell gefertigtes Messing-Reduzierstück ersetzt. Zwei Kegelräder aus Plastik übertragen die Bewegung des Schrittmotors (im Bild 1 hinter den Zahnrädern zu sehen) auf dieses Reduzierstück. Die beiden Kegelräder haben eine Übersetzung von 3 : 1, das bedeutet, dass eine Umdrehung an der Schärfeeinstellung drei Umdrehungen der Schrittmotorachse erfordern. Es kann nun ein relativ schwacher Schrittmotor verwendet werden, das die Kraft des Motors durch die beiden Kegelräder verdreifacht wird.
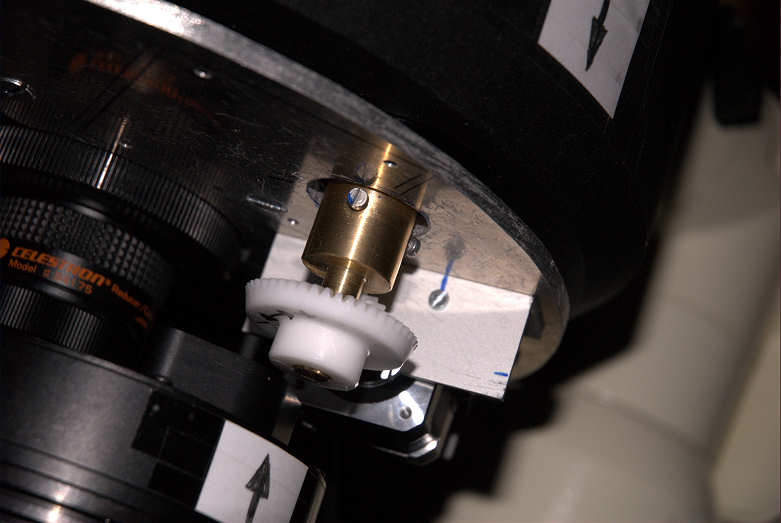
Bild 2: Das Ganze etwas größer...
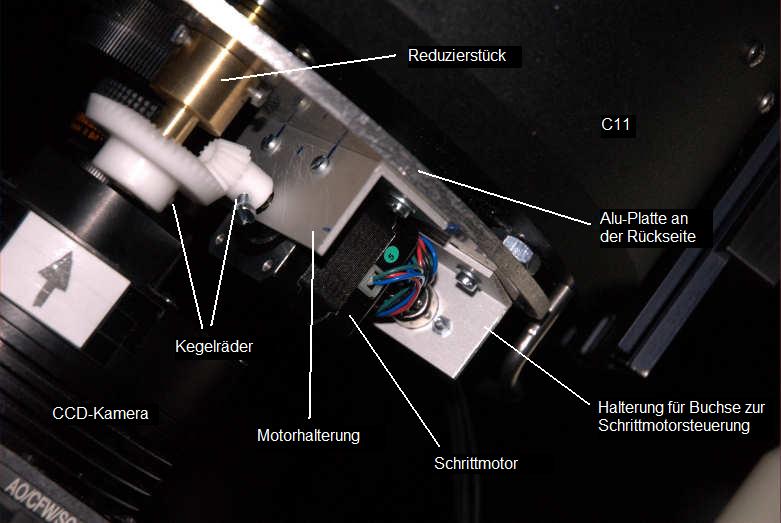
Bild 3: ...und aus einer anderen Richtung
Materialliste:
Bezeichnung
Firma
Preis (Brutto)
Bestellnummer
Reduzierstück
Fa. Gerd Neumann
Extraanfertigung, ca. 20 € ---
Kegelrad
Conrad Electronic
6,60 €
219576
Kegelrad
Conrad Electronic
(beide Kegelräder)
s.o.
Schrittmotor
Conrad Electronic
48,16 €
198722
Der Schrittmotor wird über eine Schrittmotorsteuerung von Trinamic angesteuert, die schon vorhanden war: TMCM-610 kann bis zu sechs Motoren mit einem Phasenstrom von 1.5 A ansteuern. Um den Motor zu steuern wurde ein spezielle Software in C++ mit Visual Studio 2005 erstellt (Bild 4).
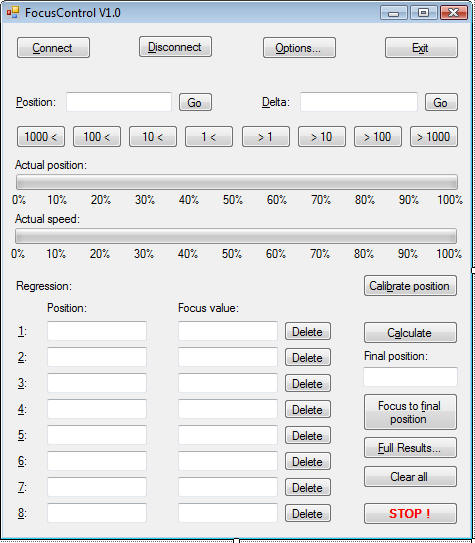
Bild 4: Das Hauptfenster der Schärferegelung
Diese Software ermöglicht es, den Motor um einen bestimmten Betrag vor und zurück zu bewegen. Die anzufahrende Position kann auch direkt als Absolutwert oder als Differenzwert zur momentanen Position angegeben werden. Der Motor wird langsam beschleunigt und dann auch wieder abgebremst. Außerdem können Schärfedaten eingetragen werden, aus denen dann eine optimale Position für die Schärfeeinstellung berechnet werden kann. Schließlich kann das Spiel für die Bewegung des Spiegels, die Bewegungsgeschwindigkeiten und weitere Parameter in einem Optionen-Fenster festgelegt und abgespeichert werden.
In den nächsten klaren Nächten soll dann die neue Hardware und die Software getestet und ggf. verbessert oder angepasst werden.